

客户评价
人类大脑计划与马斯特里赫特大学
人工智能与机器学习
Shadow Robot & AI

您可以训练我们的 Shadow 灵巧手来操纵物理对象,并以直观的方式完成目标导向的任务。
研究人员已利用神经网络,通过试错原理(强化学习)在模拟环境中训练我们的机器人手。
随后,这些数据会被迁移到我们的机器人手上,使其能够在现实环境中实时执行所需动作。
——
Shadow 如何满足您在人工智能和机器学习方面的需求
丰富的数据资源

这些数据可用于深度学习领域,研究者通过机器学习创建动力学模型,开发新的控制方法,并验证仿真质量。

——
Shadow 如何满足您在人工智能和机器学习方面的需求
传感器与功能特性
“拥有最多数据的人才能胜出”—— 因此,Shadow 灵巧手配备了多种传感器,以高达 1kHz 的速率为您提供精确数据。该机械手包含 20 个电机,每个电机均配备温度、电压和电流传感器,以及左右应变仪。
每个关节上有两根连接至电机的肌腱 —— 每根肌腱的负载由各自的应变仪测量。

位置由 26 个霍尔效应传感器跟踪,这些传感器可在本地感知每个关节的角度,典型分辨率为 0.2 度。
手掌配备一个集成三轴陀螺仪和三轴加速度计的惯性测量单元(IMU)。
所有 Shadow 机械手均标配安装在指尖的压力触觉传感器(PST)。这些传感器是经温度补偿的单区域高灵敏度传感器,提供不同指尖传感器的可选配置。
每个灵巧手在手掌背面设有 5 个模拟通道和一个辅助 SPI 端口,允许用户添加自定义的额外传感器。
位置控制回路以 1kHz 的频率运行,控制变量(设定值、过程值、输出值等)以相同速率发布。


Shadow 很荣幸曾荣获多个奖项:
2020 年 AI 奖和2019 年 AIconics 奖(人工智能硬件领域最佳创新奖)
——
Shadow 如何满足您在人工智能和机器学习方面的需求
人类大脑计划
OpenAI
谷歌大脑
人类大脑计划(HBP)与马斯特里赫特大学成功地在 HBP 神经机器人平台上集成并模拟了 Shadow 灵巧手。该平台将物理模拟器与多种神经网络(或大脑模型)相连。
我们曾与由商业巨头埃隆・马斯克和山姆・奥特曼创立的 OpenAI 合作,利用 Shadow 灵巧手推动人工智能和机器学习领域的研究。
该团队采用了一种涉及深度动力学模型(DDM)的新型机器人任务规划技术。
他们仅用四小时的真实世界数据,便能够操控多个物体。
了解更多关于谷歌大脑利用 Shadow 灵巧手进行操控的研究成果。
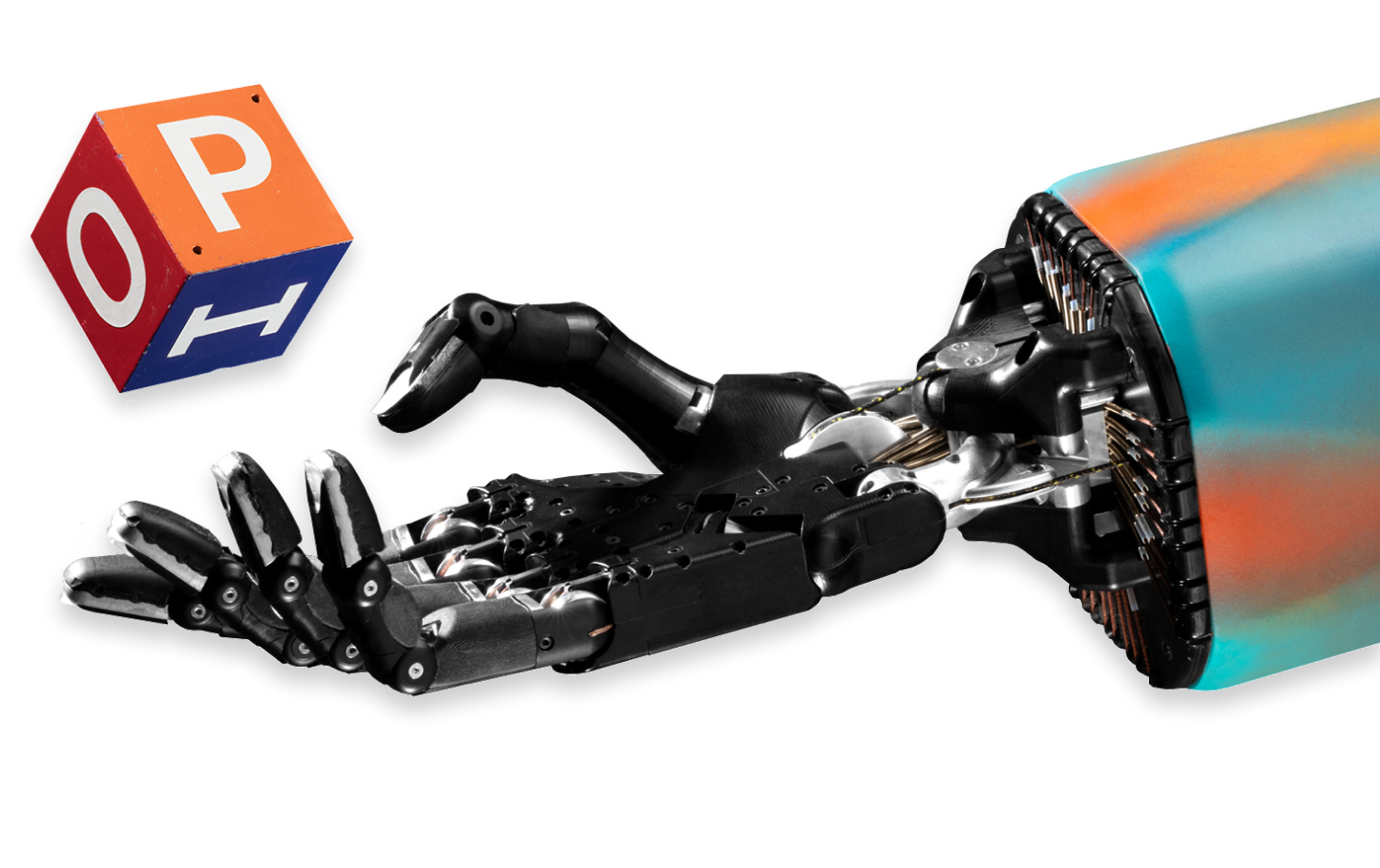
OpenAI 利用 Shadow 灵巧手,通过单手解魔方这一复杂任务来研究学习灵巧性的方法。
Shadow 灵巧手无需微调,直接在现实世界中验证了训练成果。
该研究曾登上 BBC 新闻和《纽约时报》头版。
人类大脑计划(HBP)将虚拟 Shadow 灵巧手添加到其 EBRAINS 基础设施中,以深入研究大脑如何协调复杂的手部动作。
基于接触的反馈会实时传输至大脑模型,无需耗时的物理装置搭建。
客户评价
OpenAI


微信公众号
Sale Hotline
021-56448858
024-66988889
新闻资讯
服务支持
产品中心
联系我们
产品技术