灵巧手系列
世界上最灵巧的人形机器人手之一。
推进机器人研究和工业应用
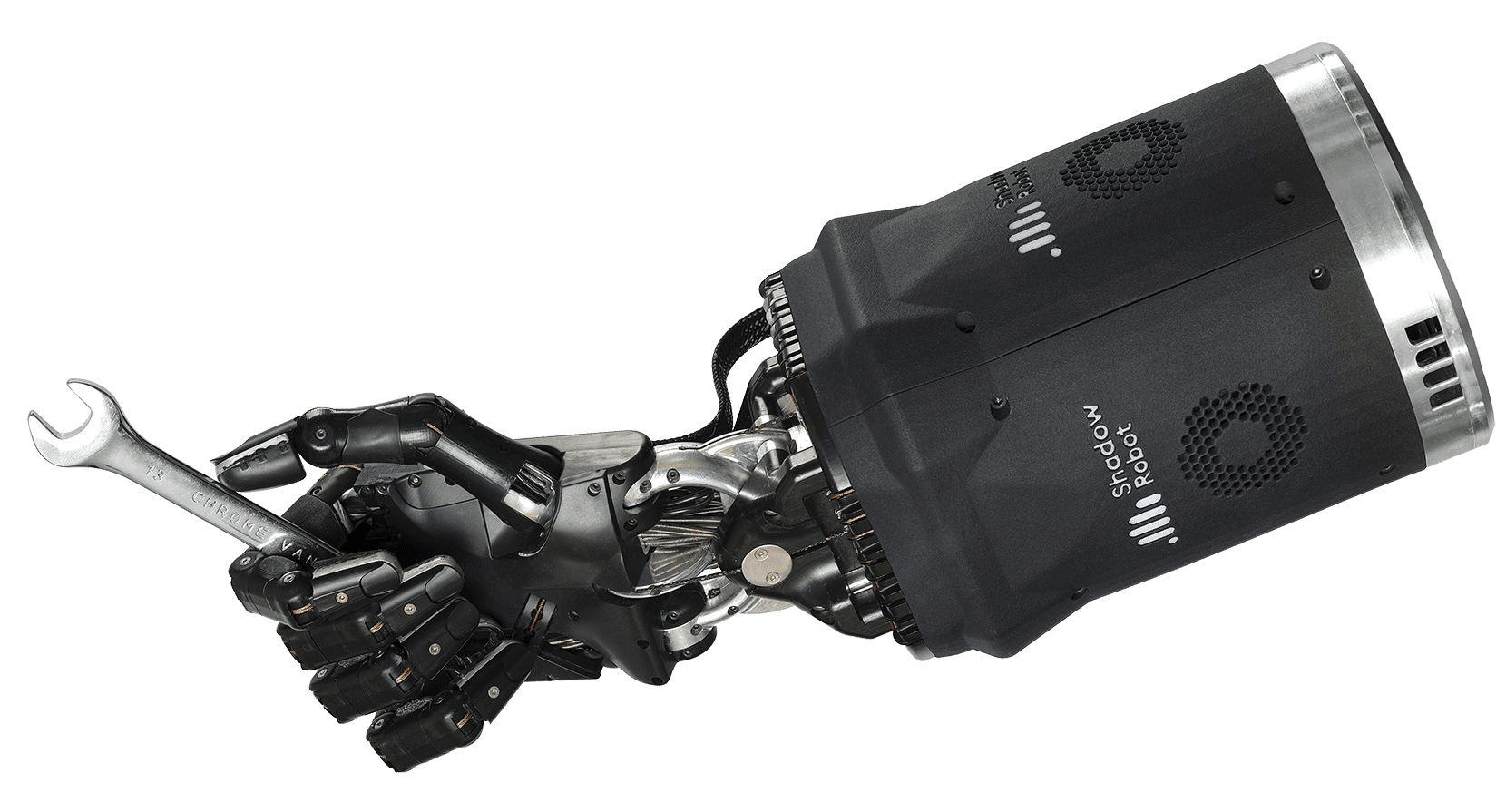
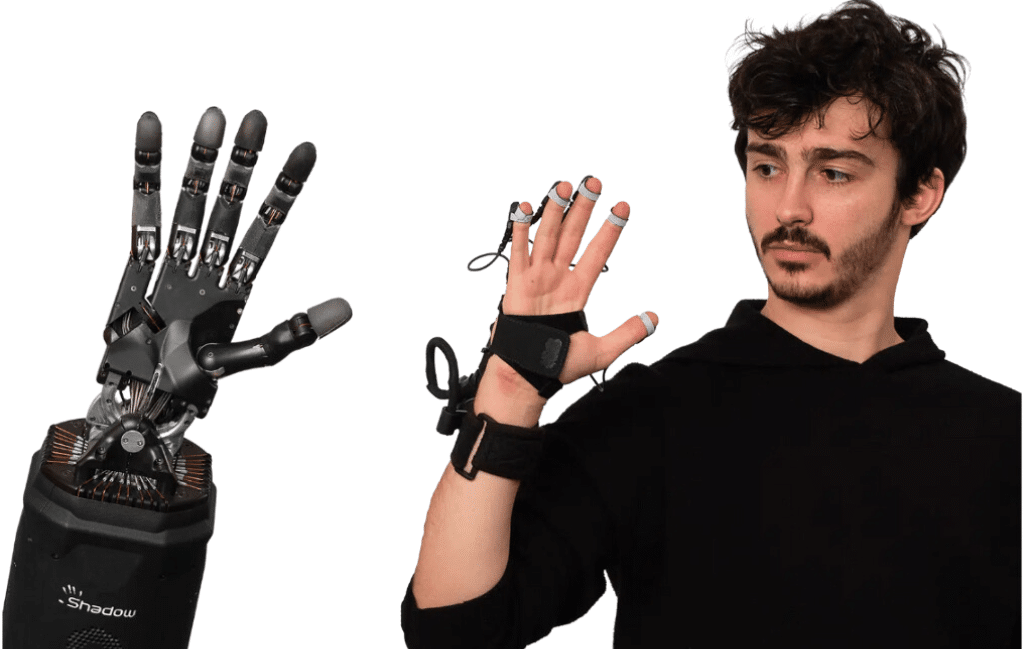
Shadow Dexterous Hand 是世界上最先进的五指机器人手之一。
“机械手”具备前所未有的精准度,能够以超越以往的精度操控工具和物体。我们的技术为机器人学和人工智能领域的研究开辟了新途径,并助力现有技术的优化升级。
——
用途和优势


——
深入了解 Dexterous lite
精简系列为您提供更大的灵活性以满足项目需求。您可以从我们的机器人手精简版、超精简版和超级精简版中进行选择。

紧凑轻便
高效节能
经济实惠
| 参数 | Shadow 多指灵巧手 | Shadow 多指灵巧手精简版 | Shadow 多指灵巧手超精简版 | Shadow 多指灵巧手超级精简版 |
|---|---|---|---|---|
| 自由度(DOF) | 20 个主动自由度 + 4 个被动运 ,共 24 个关节 | 16 个关节,13 个自由度 | 12 个关节,10 个自由度 | 8 个关节,7 个自由度 |
| 整体重量 | 4.3 公斤 | 2.4 公斤 | 2.1 公斤 | 1.8 公斤 |
| 手指数量 | 4 指 + 1 拇指(共 5 指) | 3 指 + 1 拇指(共 4 指) | 2 指 + 1 拇指(共 3 指) | 1 指 + 1 拇指(共 2 指) |
| 执行器数量 | 20 个直流电机 | 13 个直流电机 | 10 个直流电机 | 7 个直流电机 |
| 手指关节数 | 4 个 | 4 个 | 4 个 | 4 个 |
| 拇指关节数 | 5 个 | 4 个 | 4 个 | 4 个 |
| 腕部关节数 | 2 个 | 0 个 | 0 个 | 0 个 |
| 标配 STF(触觉指尖)数量 | 2 个 | 2 个 | 1 个 | 1 个 |
| 最大 STF 数量 | 5 个 | 4 个 | 3 个 | 2 个 |
| 惯性测量单元(IMU)数量 | 1 个 | 1 个 | 1 个 | 1 个 |
| 肌腱负载传感器数量 | 40 个 | 26 个 | 20 个 | 14 个 |
| 主机控制循环速率 | 1kHz(EtherCat 协议) | 1kHz(EtherCat 协议) | 1kHz(EtherCat 协议) | 1kHz(EtherCat 协议) |
| ROS 开源平台支持 | ✅ | ✅ | ✅ | ✅ |
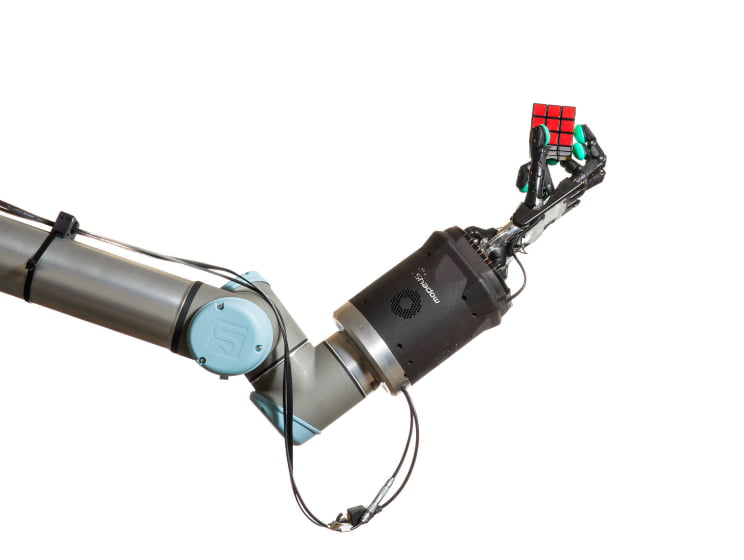
| 易于集成到机械臂 | ✅ | ✅ | ✅ | ✅ |
| 可通过其他组件升级 | ✅ | ✅ | ✅ | ✅ |
Shadow 手套
添加机械臂
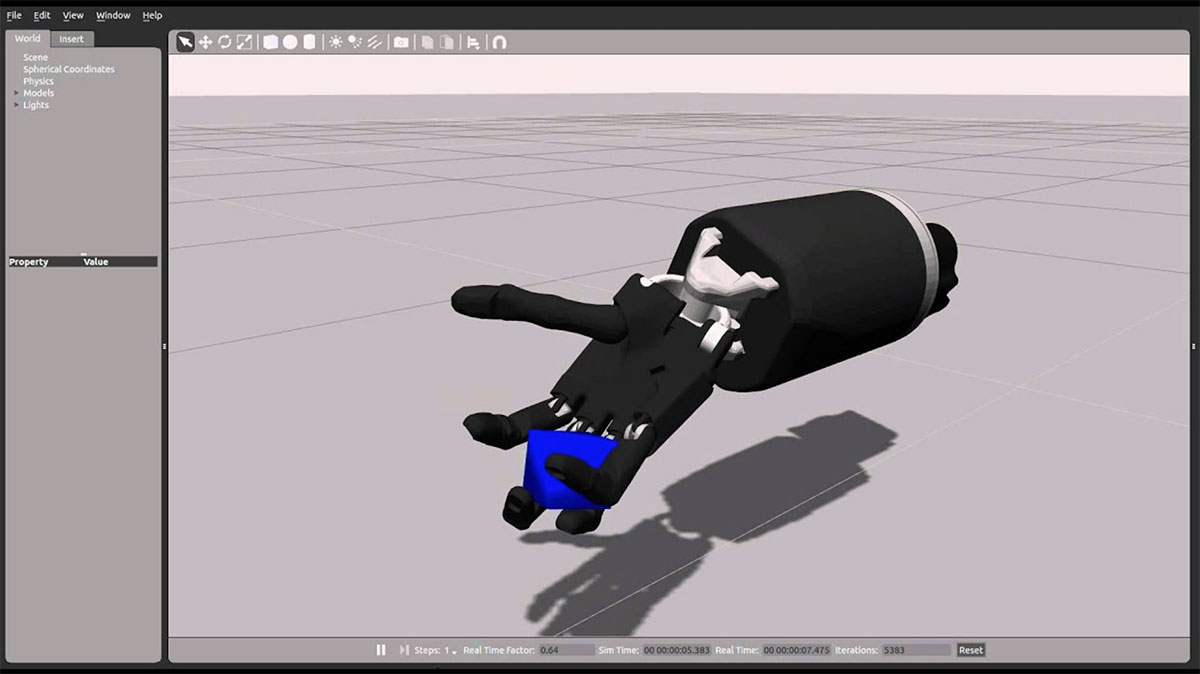
模拟仿真

——系统选项
您是研究人员吗?
了解我们的机器人手正如何被学术机构用于研究!

微信公众号
Sale Hotline
021-56448858
024-66988889
新闻资讯
服务支持
产品中心
联系我们
产品技术